Observing Ants
GVRSF 2026 · Swarm Robotics · Photo Showcase
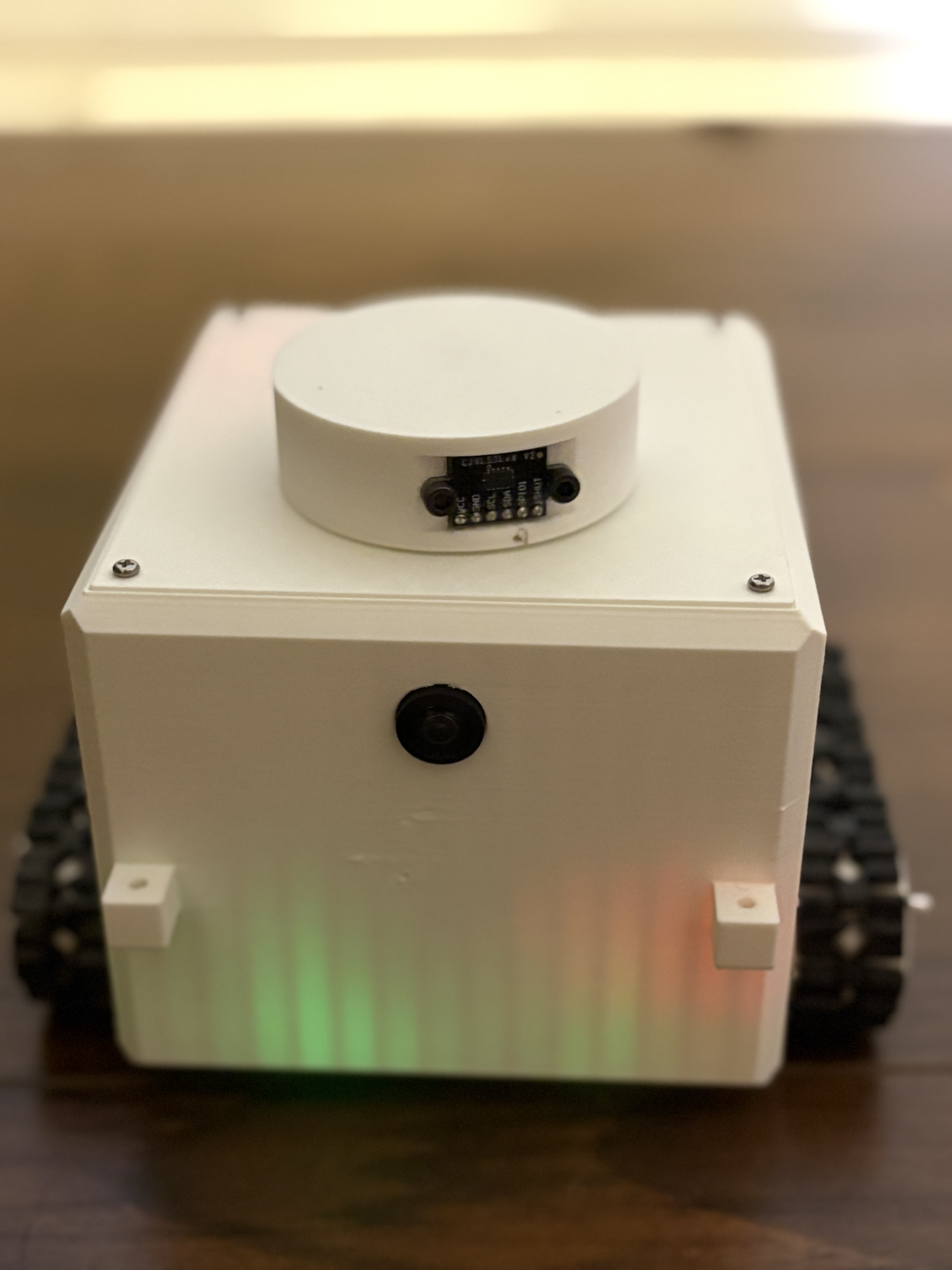
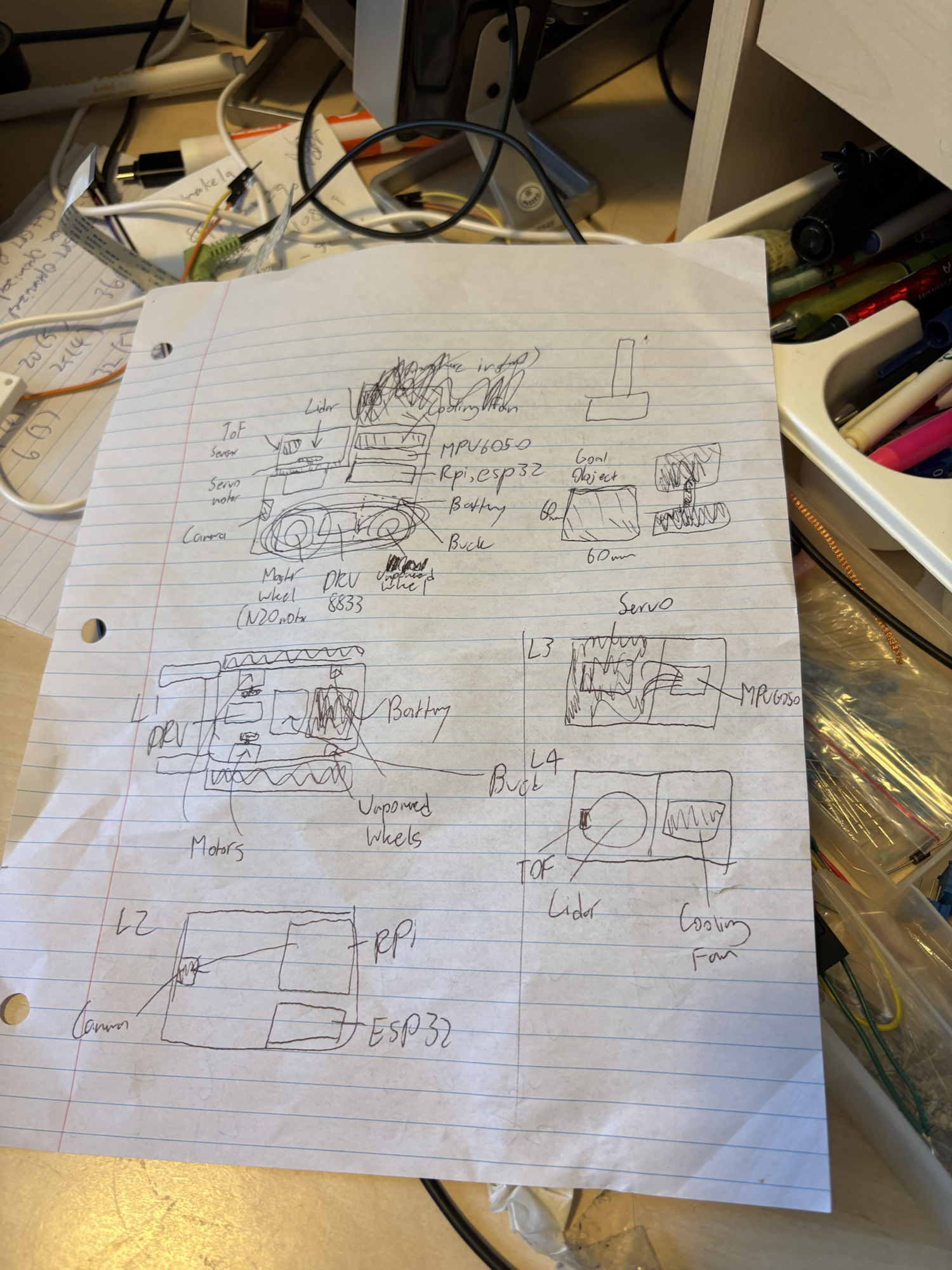
Artificial collective intelligence, shown through the robot, the diagrams, and the build.
This project explores carpenter ant-inspired swarm robotics through decentralized control, digital pheromones, Mission Control, and a physical robot platform. This page is a simple visual album with the core media and a direct link to the code.
Gallery


Videos
Making the Robots
Robots in Action
Mission Control
Code
Open-source repo, full project.
The full implementation, training stack, firmware, Mission Control, and deployment work live in the repository.